ARM工法の概要
ARM工法(Advanced Rotary Mixing Method)は,湖沼・ヘドロなどの歩行困難な超軟弱地盤上でも,計画位置への改良柱体の造成で100%の全面改良が可能であり,最大施工深度7.5mまで施工可能である。改良目的は,ヘドロなどの固化処理や不溶化処理,汚染土封込等に用いられる原位置攪拌固化処理工法である。
工法の特徴
- 定速自動昇降装置の採用
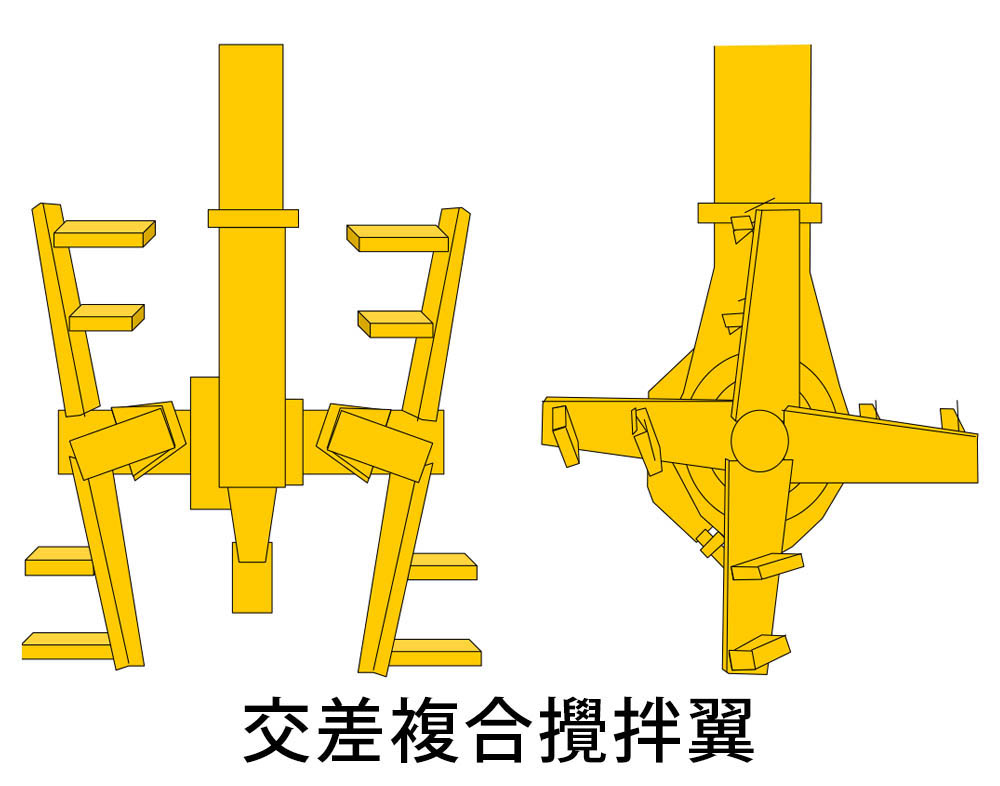
コンピューター制御により、定速、垂直に昇降することにより、固化材スラリーの添加が均一となり、攪拌軌跡が交差するため改良強度にムラが無く固化材添加量を削減できます。 - 集中品質管理モニターの採用
スラリー流量,改良深度,改良速度,垂直性などの集中管理が可能である。 - 自動施工位置誘導システム(ARMナビ)の採用
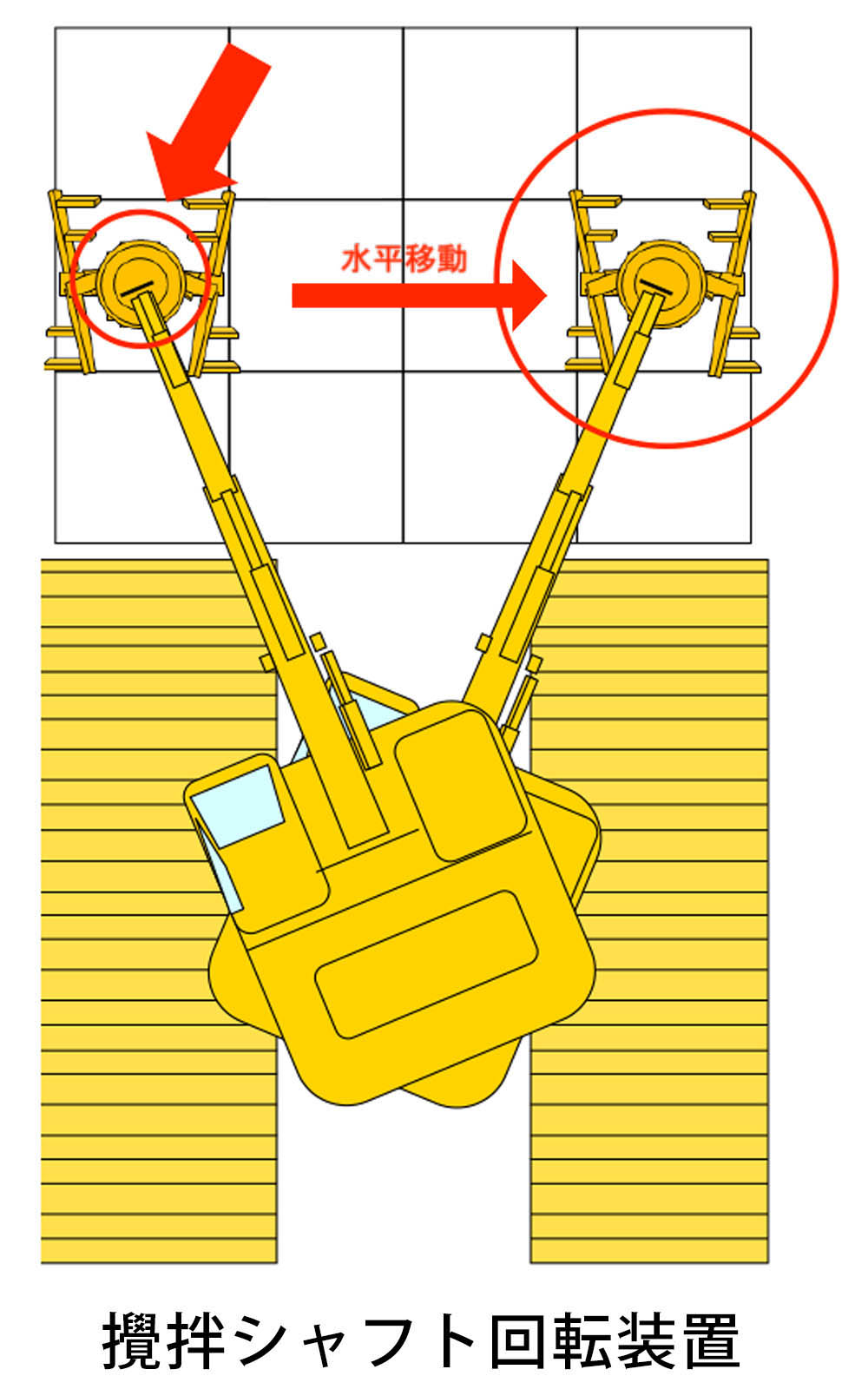
コンピューターにより改良エリアを認識する。モニターに表示された改良位置に攪拌機をセットすることにより正確な位置を確定することができる。 - 攪拌シャフト回転装置(ARM回転アジャスター)の採用
攪拌機の角度を改良エリアに対して直角に自動修正するため,未改良部が無い100%の改良が可能である。 - 交差複合撹拌翼(Xウイング)の採用
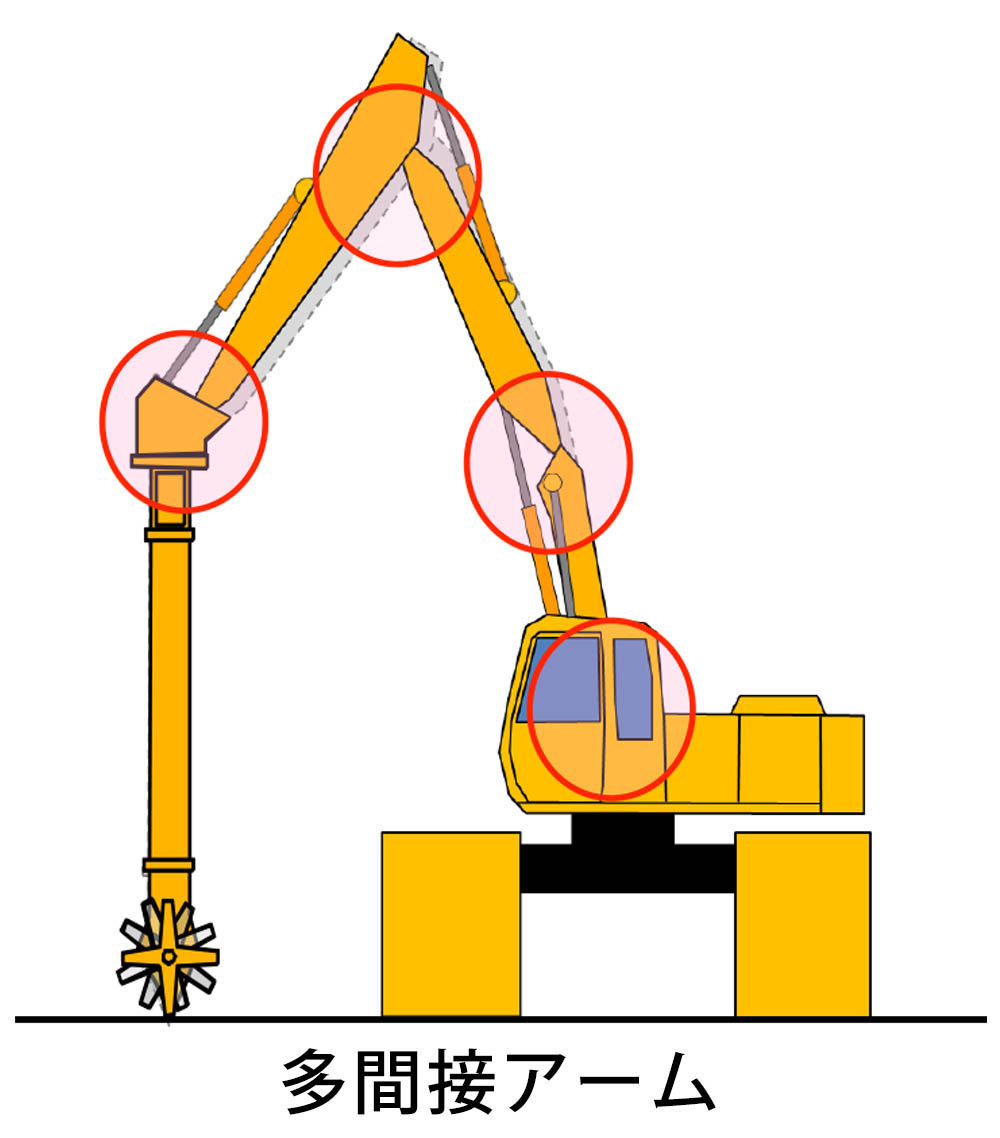
- 多関節アームの採用
従来の施工機では,重機が移動を繰り返さないと1ブロック内を垂直に改良することができ無かったが,多関節アームの採用により,改良シャフトを常に垂直に保ち,重機が移動しないで1ブロック改良し続けることができる。 - フロートキャタピラ式の採用
人が歩けないような超軟弱地盤上や泥上での地盤改良施工が可能です。